



.webp?width=1824&height=2736&name=Norsonic_v2-74-(1824x2736px).webp)

How we calibrate

/Acoustic%20camera%20white%20webp%20(664x664px)/Acoustic-camera-hextile-white-(664x664px).webp?width=664&height=664&name=Acoustic-camera-hextile-white-(664x664px).webp)
/Acoustic%20camera%20white%20webp%20(664x664px)/Multitile-acoustic-camera-white-(664x664px).webp?width=664&height=664&name=Multitile-acoustic-camera-white-(664x664px).webp)
/Acoustic%20camera%20white%20webp%20(664x664px)/Multitile-LF-white-(664x664px).webp?width=664&height=664&name=Multitile-LF-white-(664x664px).webp)
/Acoustic%20camera%20white%20webp%20(664x664px)/Nor848B-side-white-(664x664px).webp?width=664&height=664&name=Nor848B-side-white-(664x664px).webp)
/Acoustic%20camera%20white%20webp%20(664x664px)/Nor848-multitile-white-(664x664px).webp?width=664&height=664&name=Nor848-multitile-white-(664x664px).webp)
/Acoustic%20camera%20white%20webp%20(664x664px)/Norsonic-acoustic-camera-case-white-(664x664px).webp?width=664&height=664&name=Norsonic-acoustic-camera-case-white-(664x664px).webp)
/Acoustic%20camera%20white%20webp%20(664x664px)/Norsonic-acoustic-camera-details-back%20-white-(664x664px).webp?width=664&height=664&name=Norsonic-acoustic-camera-details-back%20-white-(664x664px).webp)
/Acoustic%20camera%20transparent%20webp%20(664x664px)/Nor848-multitile-transparent-(664x664px).webp?width=664&height=664&name=Nor848-multitile-transparent-(664x664px).webp)
Akustiske beamforming-arrayer – ofte omtalt som akustiske kameraer – gjør det mulig å visualisere og skille flere lydkilder etter frekvens og nivå med høy presisjon. Evnen til å skille mellom kilder som ligger tett, spesielt ved lave frekvenser, bestemmes i hovedsak av den fysiske aperturen og antall mikrofoner i arrayet.
Etterbehandlingsmetoder som bildebehandling og dekonvolusjon kan forbedre den opplevde oppløsningen, men de grunnleggende egenskapene til arrayet vil alltid være styrende for resultatets kvalitet. Forholdet mellom arraystørrelse og oppnåelig oppløsning er derfor sentralt i utformingen av akustiske kameraer.
Brukere trenger vanligvis et array som er kompakt, lett og enkelt å sette ut i felt – og som samtidig kan levere høy oppløsning og meningsfulle resultater over et bredt frekvensområde, inkludert lave frekvenser. Frem til nylig har det vært krevende å oppfylle alle disse kravene i ett og samme system.
/Acoustic%20camera%20transparent%20webp%20(664x664px)/Nor848-hextile-transparent-(664x664px)-1.webp?width=664&height=664&name=Nor848-hextile-transparent-(664x664px)-1.webp)
Med én enkelt Hextile får brukeren et lite, portabelt og lett akustisk kamera som kan brukes i et bredt spekter av målesituasjoner.
Hextile er et USB-basert akustisk kamera med én USB-kabel for både strømforsyning og datakommunikasjon – ingen ekstra batterikabel er nødvendig.
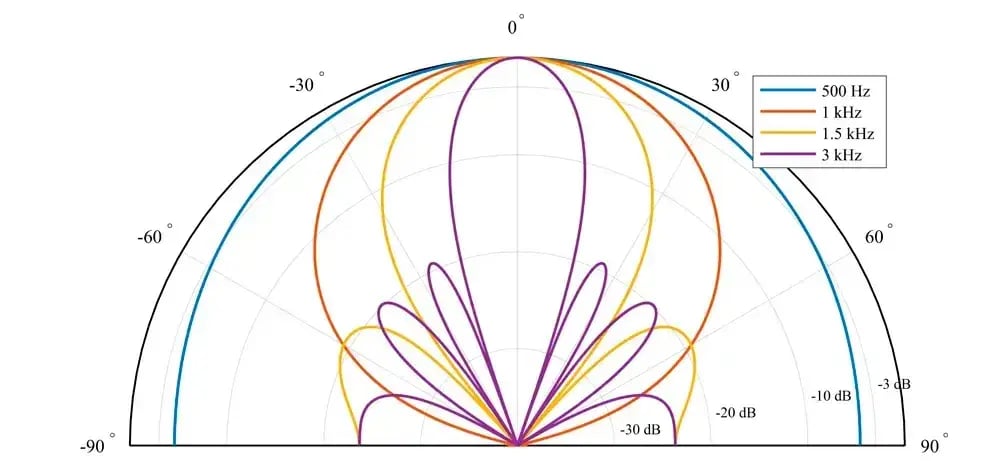
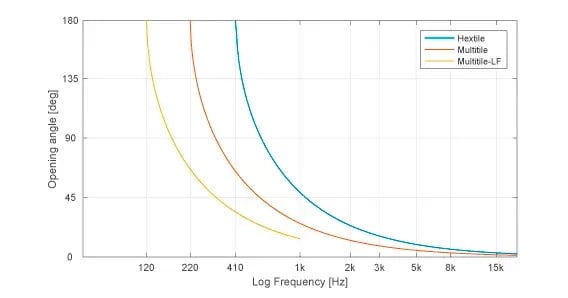
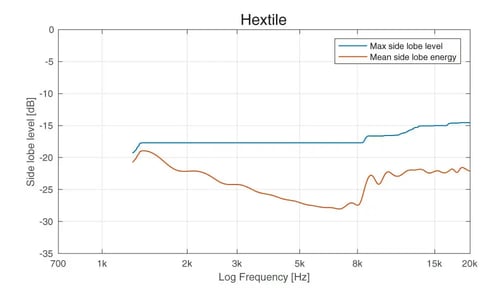
Arrayet er produsert i robust og lett aluminium, har 128 MEMS-mikrofoner og veier under 3 kg, med en maksimal diameter på 46 cm. Nedre frekvensgrense for Hextile er 410 Hz.
Arraygeometri og strålingsdiagram for Hextile:
/Acoustic%20camera%20transparent%20webp%20(664x664px)/multitile-transparent-(664x664px).webp?width=664&height=664&name=multitile-transparent-(664x664px).webp)
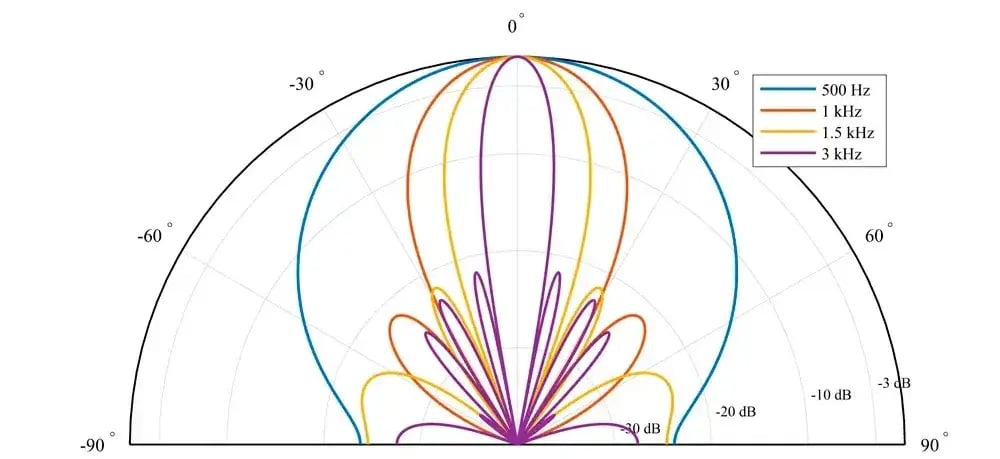
Hvis du trenger høyere oppløsning, spesielt ved lave frekvenser, kan du kombinere tre enkeltstående Hextile til ett Multitile-system. Dette gir deg 384 mikrofoner og en maksimal array-diameter på 96 cm.
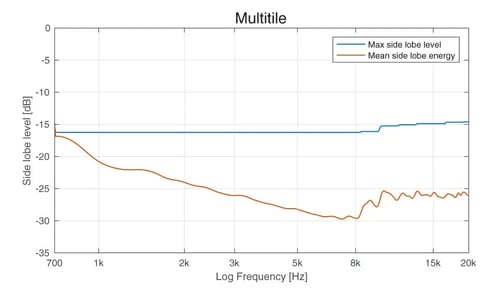
Nedre frekvensgrense for Multitile er 220 Hz.
Arraygeometri og strålingsdiagram for Multitile:
/Acoustic%20camera%20transparent%20webp%20(664x664px)/multitile-lofreq-transparent-(664x664px).webp?width=664&height=664&name=multitile-lofreq-transparent-(664x664px).webp)
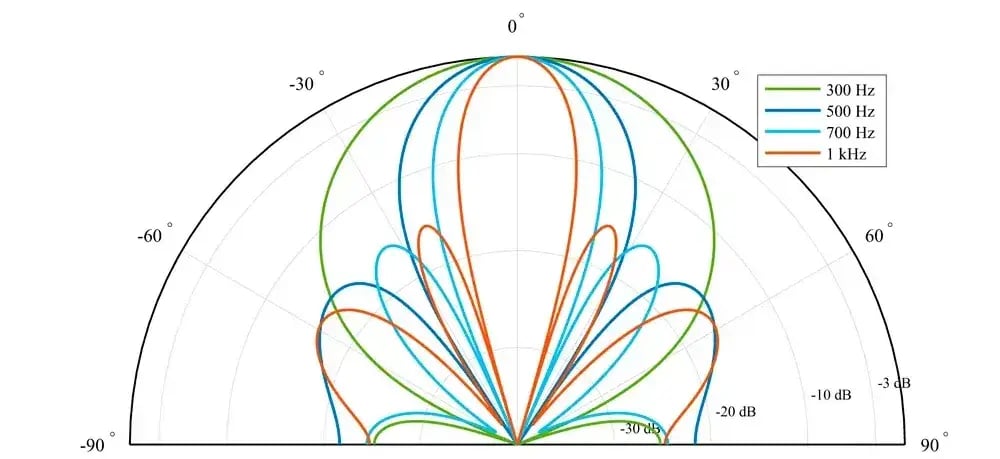
For spesielle lavfrekvente applikasjoner under 1 kHz kan du bruke Multitile i lavfrekvenskonfigurasjon som Multitile (LF-modus).
Ved å plassere de enkelte Hextile-enhetene lenger fra hverandre økes maksimal diameter for hele arraysystemet til 1,46 m, noe som gjør det godt egnet for lavfrekvensmålinger.
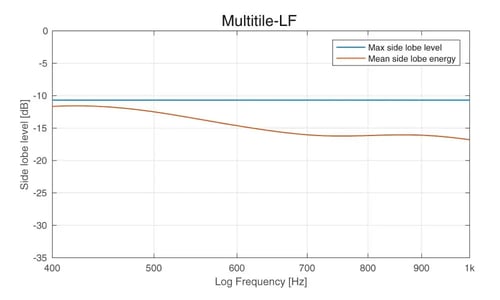
Multitile (LF-modus) er beregnet for lavfrekvensmålinger under 1 kHz, med en nedre frekvensgrense på 120 Hz.
Arraygeometri og strålingsdiagram for Multitile (LF-modus):
Funksjonen som virkelig skiller programvaren fra andre løsninger er den virtuelle mikrofonen. Den virtuelle mikrofonen gjør det mulig å hente ut lydsignaler kun fra valgt lytteposisjon, og å lytte til lyd som kommer fra bestemte retninger i videobildet, samtidig som støy og lyd fra andre posisjoner undertrykkes. Med dette verktøyet får brukeren et langt tydeligere lydbilde og kan oppnå mer innsikt enn med kun tradisjonell fargeplott av kilder. Dette er spesielt nyttig i støyende og komplekse lydmiljøer, der flere støykilder ellers gjør det vanskelig å identifisere hvilken maskin som genererer en uønsket lyd.
I tillegg til live-plotting og retningsbestemt lytting er det mulig å lagre målingene og gjøre analysen på et senere tidspunkt. Råsignalet fra alle mikrofonene lagres, og alle parametere som frekvensvalg, tidsutsnitt osv. kan endres i etterbehandlingen.
Dette betyr at opptak kan gjennomføres uten at optimale parametere må være valgt under selve målingen, siden disse kan justeres i analysefasen. Det innebærer også at hvem som helst i praksis kan gjøre opptakene – det er i hovedsak nok å rette arrayet mot området av interesse og trykke «record».
All analyse og parameterjustering kan deretter gjøres i etterbehandlingen, inkludert retningsbestemt lytting, grafisk markering av kilder, spektrogram, FFT-analyse og tilsvarende funksjoner.
Noen ganger ligger kilder svært tett, eller en sterk støykilde i området av interesse forstyrrer opptaket og forringer bildekvaliteten. Dette kan ofte fremstå som én stor kilde, eller at kilden du egentlig er interessert i blir helt skjult av en sterkere kilde.
I eksempelet under er to like sterke kilder plassert nær hverandre, og det resulterende fargeplottet viser én stor sammenslått kilde. I slike situasjoner er funksjonen akustisk viskelær særlig nyttig.
Funksjonen legger en rød sirkel på skjermen som kan dras til et vilkårlig punkt for å undertrykke kilden i dette punktet. Dette er svært effektivt når flere støykilder er til stede. Som vist i illustrasjonene fjerner det akustiske viskelæret kilden der «suppress point»-markøren er plassert. Den virtuelle mikrofonen kan deretter plasseres på kilden du ønsker å analysere nærmere.

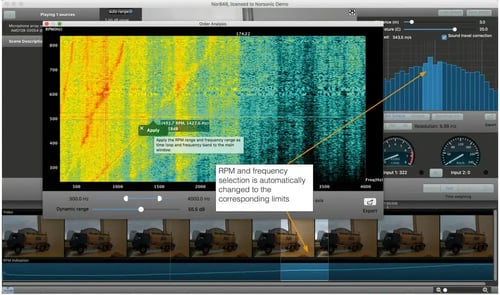
Særlig i bilapplikasjoner kan turtallsmålinger (RPM) gi avgjørende informasjon. Programvaren for akustisk kamera har derfor en ordreanalysefunksjon som kan vise frekvensinnhold som funksjon av RPM. I spektrogramvinduet plottes frekvens mot turtall, og brukeren kan markere et område i spektrogrammet for å isolere interessante hendelser.
Når du trykker «apply» på utvalget, justeres RPM- og frekvensgrensene i hovedvinduet automatisk til verdiene som ble valgt i spektrogrammet. På denne måten kan en interessant lydhendelse først identifiseres i spektrogrammet, og deretter vises som tilhørende fargeplott i hovedbildet.
Tilkobling: USB
Mikrofoner: 128 MEMS-mikrofoner
Maks. lydnivå: 120 dB
Min. lydnivå (system): 9 dBA
SNR per mikrofon: 65 dBA
SNR array (system): 82 dBA
Lydsamplingsfrekvens: 44,1 kHz
Kameraoppløsning: 2592 x 1944
Åpningsvinkel: 105°
Bildehastighet: 15 FPS
Arbeidstemperaturområde: -40 til +85 °C
Per mikrofon (flat): 100 Hz – 20 kHz
Per mikrofon: -26 ±3 dBFS/Pa @ 1 kHz, 94 dB
Romlig følsomhet Hextile: 410 Hz – 20 kHz
Romlig følsomhet Multitile: 220 Hz – 20 kHz
Romlig følsomhet Multitile (LF-modus): 120 Hz – 1 kHz
Dimensjon Hextile: 41 cm x 48 cm, Ø 48 cm
Dimensjon Multitile: 83 cm x 84 cm, Ø 96 cm
Dimensjon Multitile (LF-modus): 126 cm x 121 cm, Ø 146 cm
Vekt Hextile: < 3 kg
Vekt Multitile: < 10 kg
Materiale: Aluminium
Effektforbruk: < 3 W
.webp?width=1824&height=2736&name=Image-107-(1824x2736px).webp)
Bygningsakustikk handler om lyden som brer seg mellom rom – noe du helst vil unngå.
/Nor150-sound-inensity-jorge(800x800px).webp?width=800&height=800&name=Nor150-sound-inensity-jorge(800x800px).webp)
Mål lydnivå og retning, selv i utfordrende akustiske omgivelser. Finn støykilder på en nøyaktig måte.



.webp?width=450&height=275&name=Norsonic_v2-23-(2736x1824px).webp)
.webp?width=450&height=275&name=NoiseTag-in-NorCloud-round-corners(1200x850px).webp)